Catapult Bot
What I dub as the Catapult Bot was designed and built for the 2015/2016 VEX Robotics Competition; Nothing But Net. The goal of the game was, as the name implies, to get balls into your team's net.
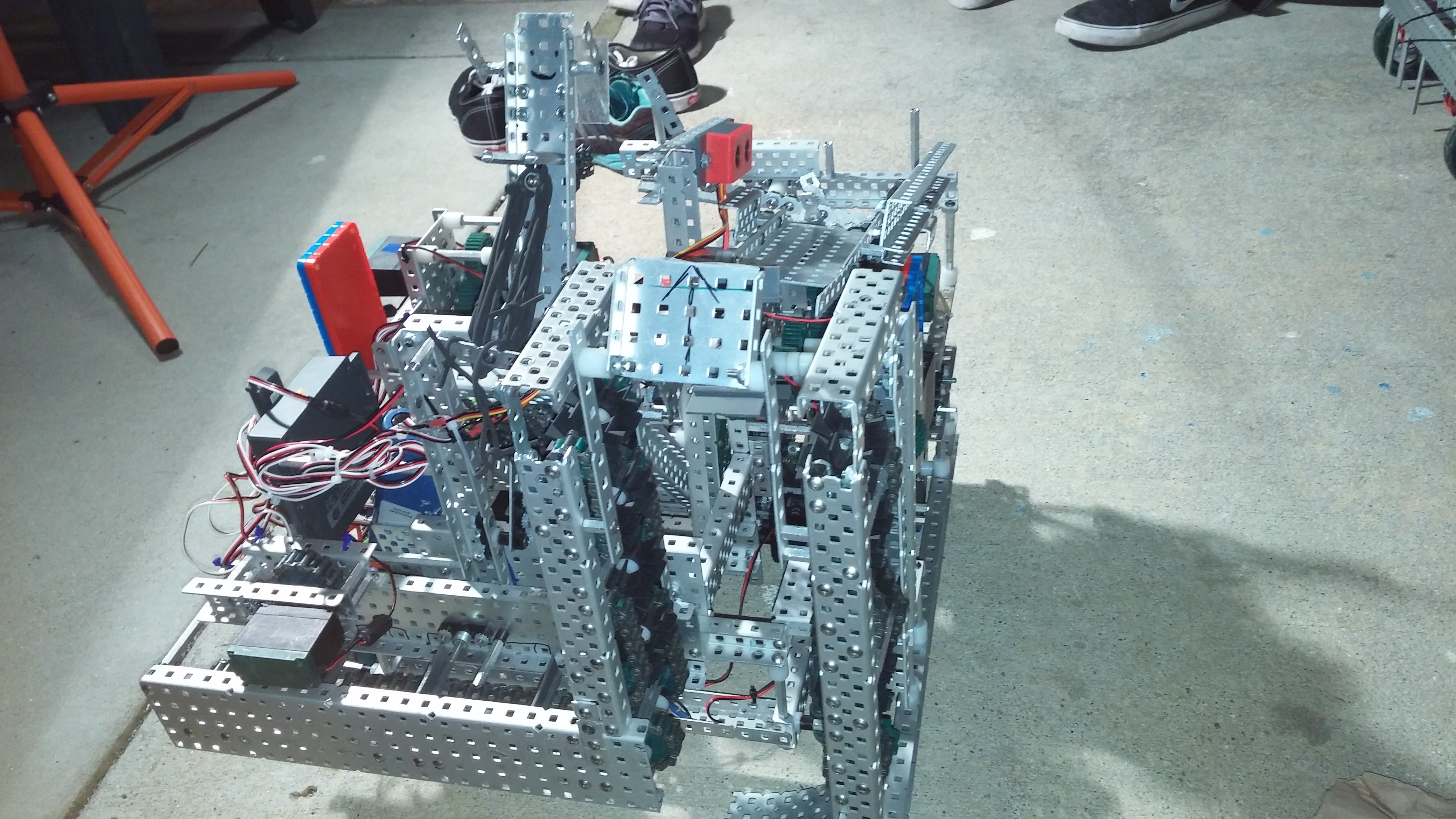
The Catapult Bot featured a catapult powered by 6 VEX motors, a 2/6 motor drive train, that would offload 4 motors towards the catapult during launch mode via pneumatic transmission, a tension adjuster to adjust tension from long range launching to medium range launching, and an L shaped intake system to maximize the area of ball intake while making do of the limited available space for an intake system. It also featured an ultra-sonic sensor to allow the user to consistently pull back the catapult to its limit and autonamous launching functions, an ultrasonic sensor on the intake to notify the bot when a ball is ready to be fed into the catapult, motor encoders on the drive train for autonamous movements, and a smiley face for good measure.
Looking back on this bot, there are many improvements that I would like to do but missed out on when I created this bot, such as a geared and cushioned feeding system to allow for a more consistent and quicker transfer of the ball onto the catapult, significantly more compact transmission system, and you know, having it be more aesthetically pleasing :^)
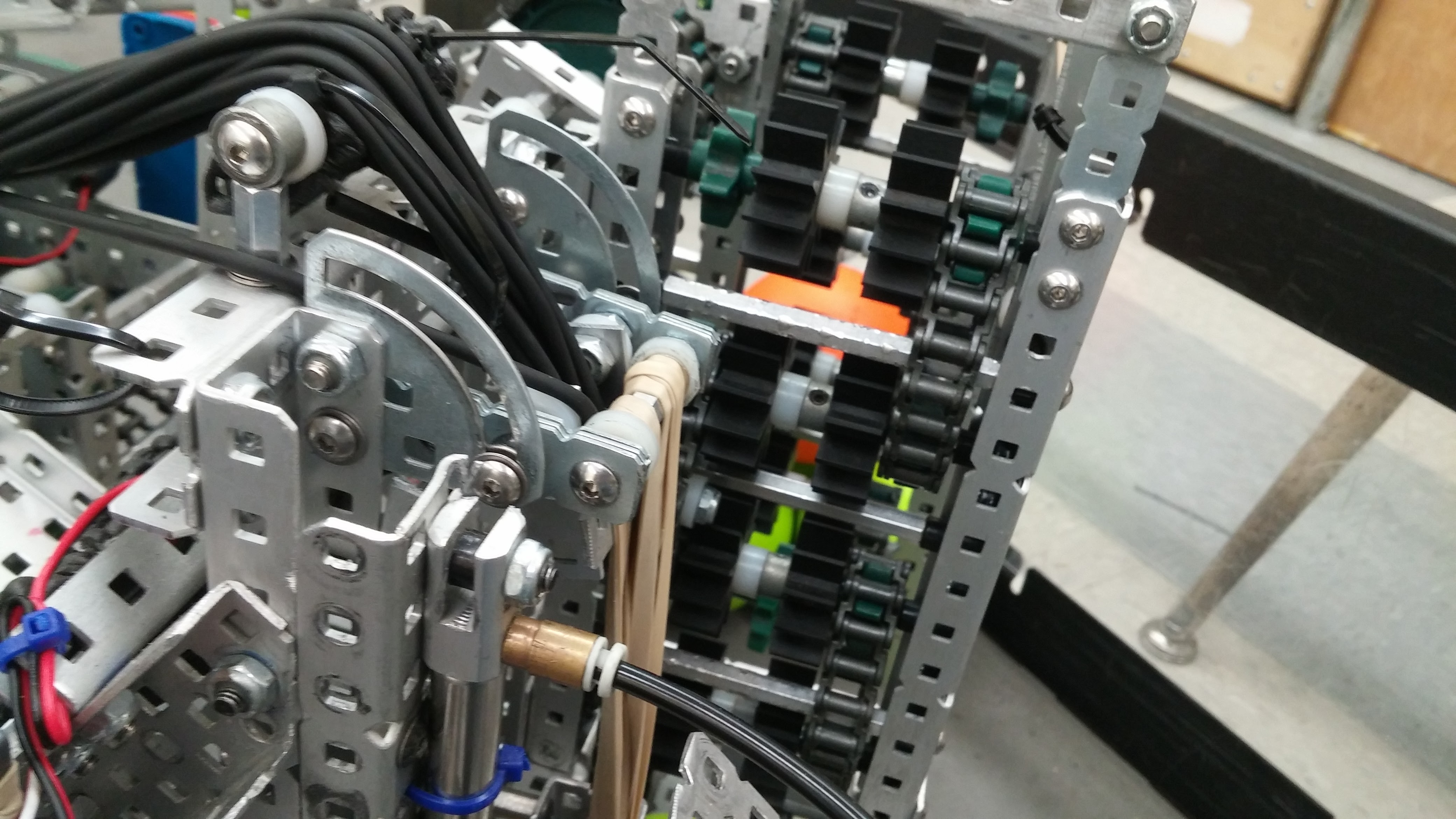 Tension adjuster
Tension adjuster